




《算法笔记》总结No.3——排序
基础算法之一,相当重要。在普通的机试中如果没有数据类型和时空限制,基本上选择自己最熟悉的就好。本篇只总结选择排序和插入排序,侧重应用,408中要求的种类更加繁多,此处先不扩展难度~总结最常用的两种排序。 一.选择…

3.js - 模板渲染 - (包含:模板渲染的步骤) - 简单
3.js 真tm枯燥啊,狗都不学
效果图 源码 // ts-nocheck// 引入three.js
import * as THREE from three// 导入轨道控制器
import { OrbitControls } from three/examples/jsm/controls/OrbitControls// 导入lil.gui
import { GUI } from three/examples/jsm/libs/li…

SLAM(Simultaneous Localization and Mapping)算法
SLAM(Simultaneous Localization and Mapping)算法,即同时定位与地图构建算法,是一种通过传感器数据实时估计机器人自身位置和构建环境地图的技术。该算法广泛应用于机器人、自动驾驶、增强现实(AR)、无人机…
GIT 使用相关技巧记录
目录
1、commit 用户信息变更
全局用户信息(没有特殊配置的情况下默认直接用全局信息)
特定仓库用户信息(只针对于当前项目)
方法一:修改config文件
方法二:命令方式
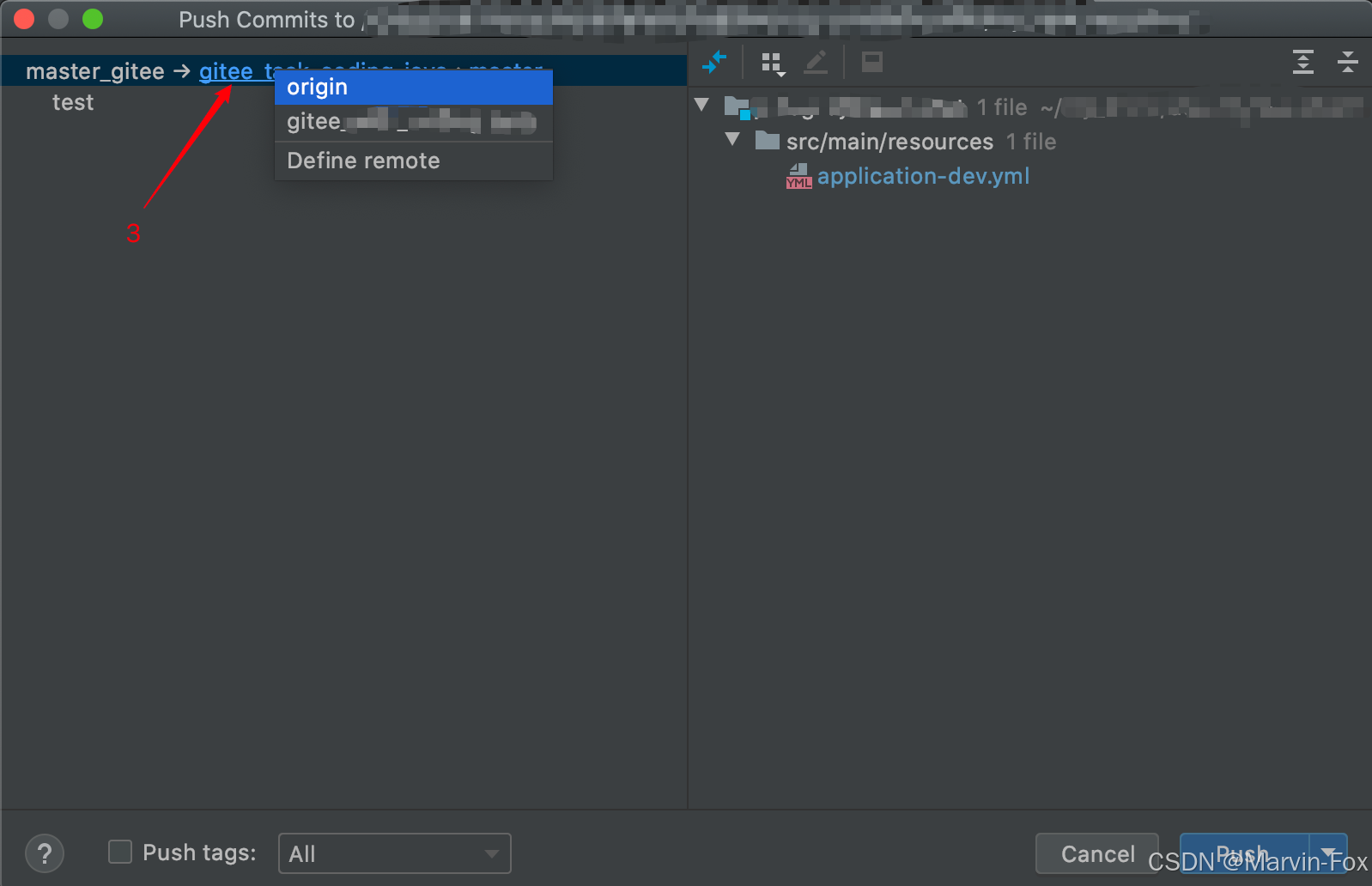
2、idea同一代码推向多个远端仓库…
从0制作自己的ros导航小车(01、准备工作)
@TOC
前言
本篇说明需要具备的知识和软硬件。可以不用全部具备,但基础要有,写的不是非常详细。 本小车分为上位机与下位机两部分,上位机使用旭日x3派运行ros进行开发和算法实现,下位机使用stm32驱动底盘和传感器数据采集。
一、知识 ①stm32部分(当然也可以使用其它控制…